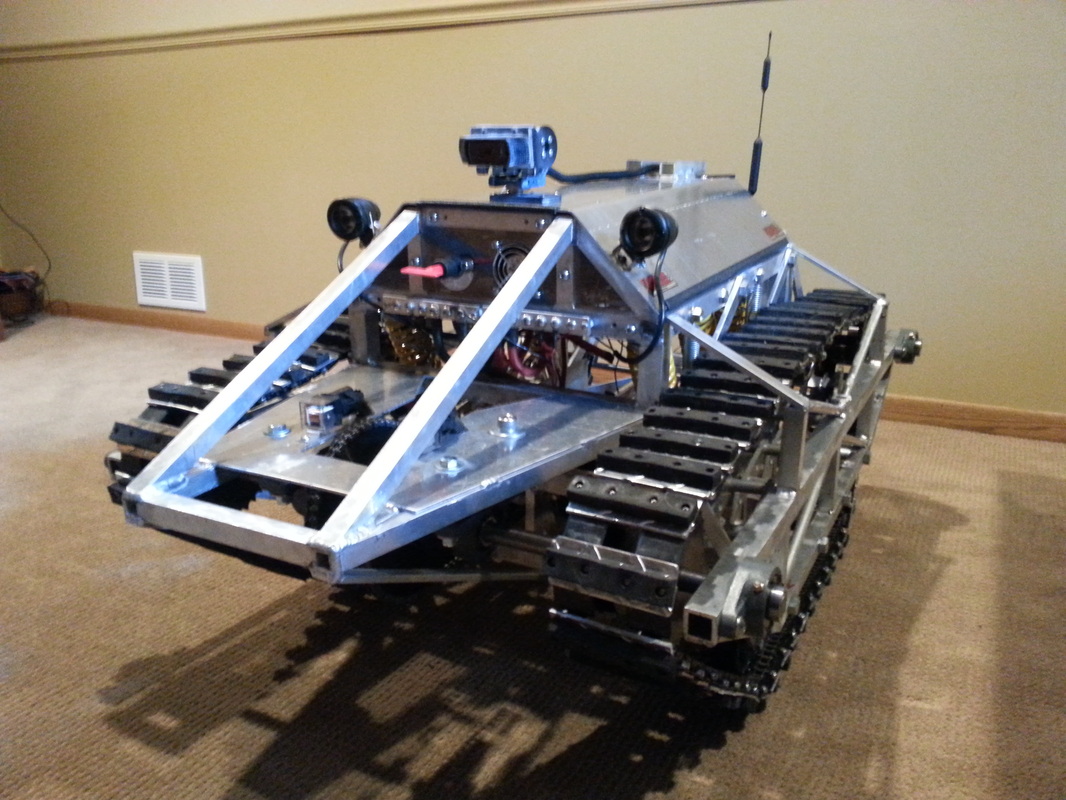
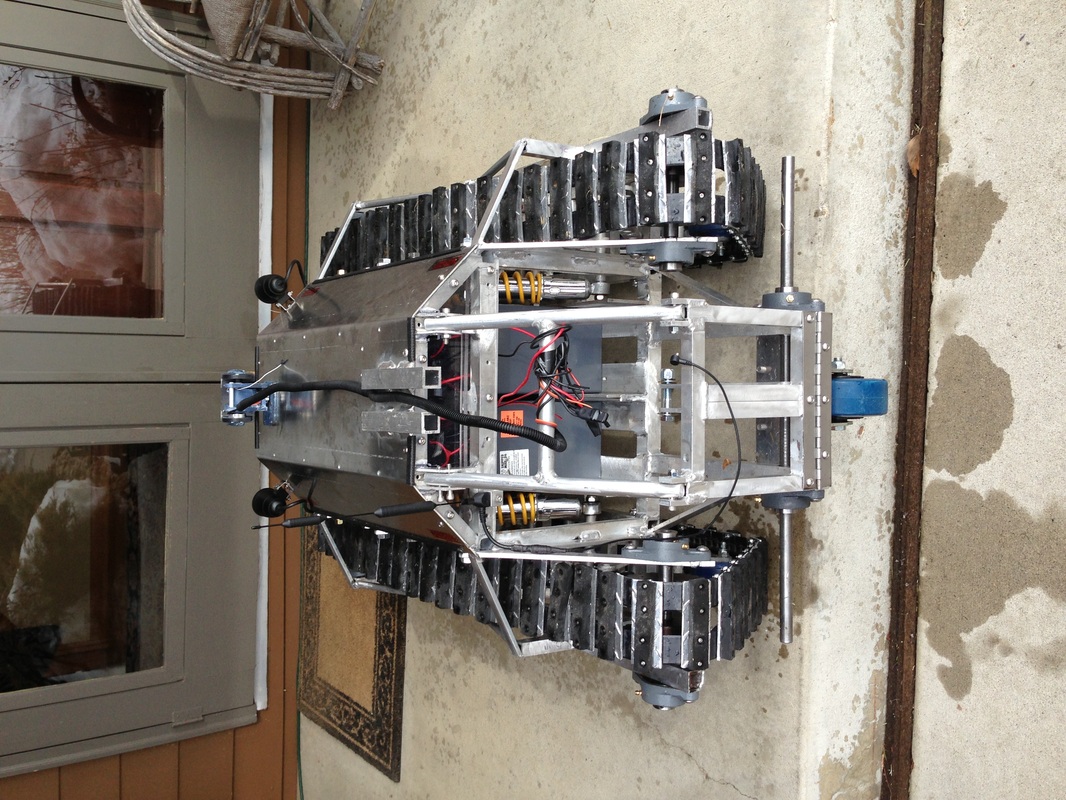
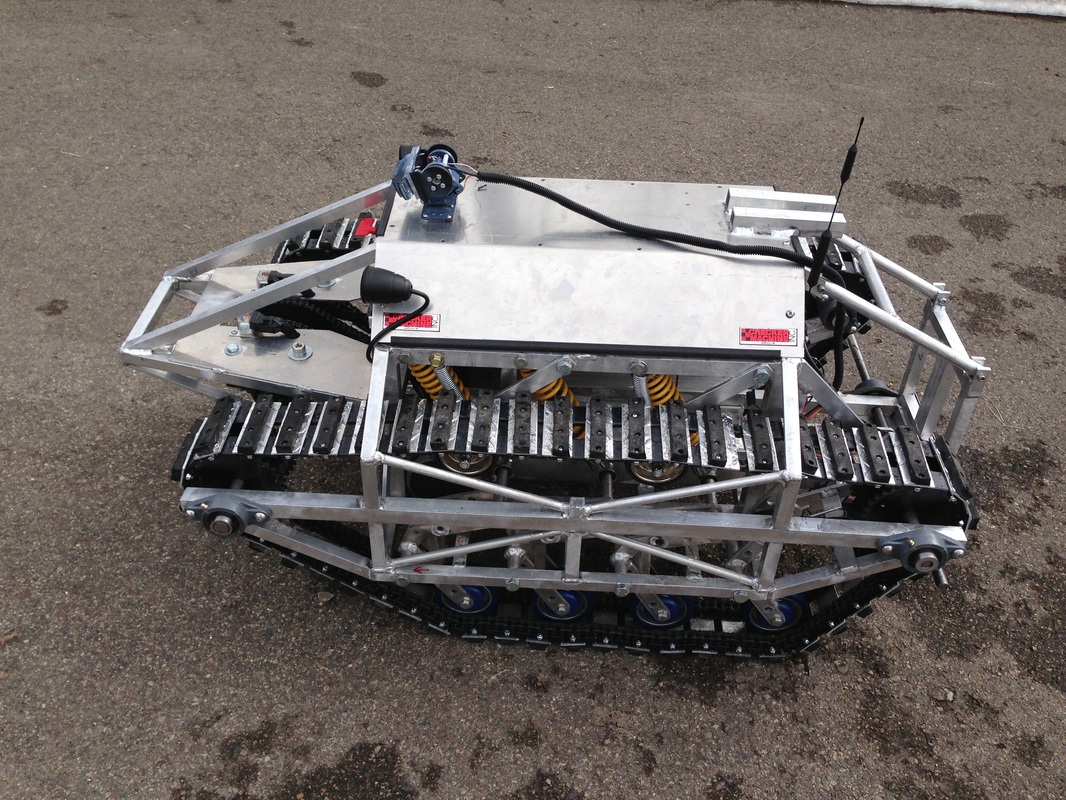
| | These last fews, I have been taking it easy waiting for the linear actuators to arrive. I ordered them about two weeks ago so they should arrive in a few days, but I won't get them until next week because I am in Florida on spring break. I have gotten some more testing done and taken up to date images, which you can see on the left. It performed fairly decent in the snow, but it did get stuck a few times so one thing I can improve is decreasing the ground pressure by increasing the width of the track pad from .75" to 1.25", but I won't do this for a while. Also I noticed the doglegs are bending due to the soft alloy used so I am going add a rectangular tube in the appropriate axis the force is acting on. |
0 Comments
Well, this week has been crazy! So much has happened. I'm not sure where to start... The judging for the Twin Cities Science and Engineering Fair began Friday and at the beginning of the week, I had yet to test the robot on the ground. Not to mention, it was -10 below all week so it wasn't exactly ideal testing conditions. But I was able to test Wednesday on the ground and the tests were a success! It could pull me (160 lbs) up a 30 degree incline covered in snow and ice as you can see in the video below. I was very pleased with the test results, but there were a few issues that need to be resolved. - The first is that the shock absorbers were too stiff. So I disassembled them to see if I could reduce the force needed to compress the shock absorber and I found that the shock absorbers were sent to me faulty. Usually there is a gas- typically nitrogen- found in the cylinder that is responsible for dampening, but the only thing that was doing the dampening was the coil itself and thats just bad. So I need to find some gas springs to replace these. - The wire connected to the relay coils is too fragile and often tears when performing maintenance. 24 gauge wire with thicker strands (larger diameter) and a more heavy duty insulation must be used - At high speeds, there is too much slack in the tracks so they must be tightened to prevent undulations Check out this test video below
Well, now its time to get back down to business with the VES (Victim Extraction System) and getting the suspension system properly functioning. I just ordered the actuators from Progressive Automations for over $600! Its a large investment, but I think it will pay off. As for the suspension, I am going to replace the current shock absorbers with gas springs for dampening in combination with torsion springs for rebound/ return. Now the difficult part is finding a product with the correct specs. | AuthorI am a senior at Benilde- St. Margaret's high school with a passion for engineering. I want to make my mark on the world through the innovations I produce. Simple as that. ArchivesMay 2014 Categories |








 RSS Feed
RSS Feed